San Diego City Robotics

AUV — Concepts
Some Useful Concepts to have when Creating an AUV.
- Closed Loop Systems — The basic Concept.
- Buoyancy — The Buoyancy Force, Archimedes Principle, Balance
- Moving — Roll, Pitch, Yaw, Depth, Moving in a Fluid.
- Maintaining Course — Compass, Gyroscope etc..
- Vision in Computers — Calculating an Image as Data
- Hardware Programming — Developing software for Micro controllers and various sensors.
- Hearing in the Water — RADAR, SONAR, etc..
- Teamwork — How to organize an Engineering Project
- Fund raising — Equipment and resources are not free.

These are some of the main concepts that every team deals with when designing an Autonomous Underwater Vehicle. The following information should give you a greater understanding of what goes into a project of this scale as well as learning what various engineering challenges we face. For those who would like a more in-depth look at the competition here are two documents The Competition Rules and The Kraken Journal. If you would like to attend the event you can find information about that here.
Closed Loop Systems:
Closed loop systems are at the center of the “autonomy” of an autonomous underwater vehicle. The concept of a closed loop allows the different systems to work together to adjust to varying conditions. For example: The submarine sets off in a straight line and the CPU registers an obstacle 10 meters in front of it. The ship consults its internal program and it says that it should only avoid an object closer than three meters so no action is taken. The submarine continues on its

straight line and after some time the obstacle is now three meters away,the submarine consults its internal program and the program says scan left and right of the obstacle and look for a clear path. A closed loop allowing simple navigation.
There are many such loops in the Kraken’s systems depth gauges, sonar, a visual recognition component, a gyroscope, compass and others. They all combine to provide the submarine with enough information to interact with and navigate through the environments it must face. Because events happen in real time and sequentially, the closed loop system allows the submarine to predict events and undertake actions based on what will occur. And hopefully, we have taken care of every eventuality that the Kraken will have to face in its trial.
Archimedes Principal
“The upward buoyant force that is exerted on a body in a fluid whether fully or partially submerged, is equal to the weight of the fluid the body replaces.” This principal has influenced several design decisions in the creation of the Kraken. The first is that the Kraken has a small acrylic cylinder to house the electronics rather than the previous pelican cases or any other arrangement, this makes it easier to sink, and easier to maneuver.
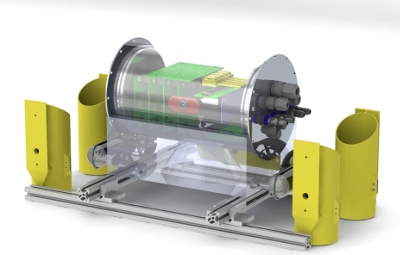
Another consideration has been the placement of the cylinder, the cylinder is symmetrical along the median line both front and back and side to side of the Kraken, which keeps it from tilting to one side or pointing up or down. And a corollary of the buoyancy principal, the water is exerting that given amount of force on the box as it descends, which has caused us to re-evaluate how we should handle electronic connections into and out of the electronics housing a couple of times. As to our choice of electronic containers we have gone through a winnowing process in which we considered three other alternatives to our acrylic cylinder. Two horizontal cylinders: one based on an expired scuba tank, the other based on a clear acrylic cookie jar, and finally, a round vertical cylinder based on a pressure cooker. All showed a great deal of promise, and the tank and pressure cooker were attractive because they provide their own counter-weight to the buoyant force they create. But the acrylic cylinder with the machined aluminum endcaps gave us the greatest control over the design and the critical electronic connections into the housing.
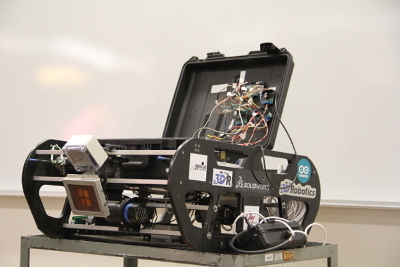
For 2015 after the Mechanical Team reverse engineered the Kraken, they dedicated their time to re-designing the submarine. However, they have been impeded by the slow process of ordering parts, and have begun the fabrication of secondary and tertiary shells for the submarine. The lack of proper tools has slowed this process down also, but the mechanical team remains dedicated to producing the most accessible design possible for the Kraken.
Motion in Water — Roll, Pitch and Yaw
Steering a submarine is a challenging when it is done using a manned vehicle, but when using an autonomous vehicle that must negotiate in three dimensions and monitor its own speed and depth without human intervention, it presents quite a challenge. The terms we use are “roll,” “pitch” and “yaw.” depth and velocity.
These are approximately the same terms used to describe an airplane. They describe rotation on the X, Y and Z axis the underwater depth and the forward speed. This provides for all six degrees of freedom that three dimensional motion entails. This is accomplished by a closed loop that includes a gyroscope,a compass a device known as an “arduino” and a software program that interfaces with the visual and sonar units, depth gauge, as well as the steering motors. The system must monitor its proximity to nearby objects, its depth and it’s destination. It is quite a system.
Navigation — Compass and Gyroscope
The gyroscope and compass are used in a closed loop that allows for navigation. When the sensors indicate the need for an unplanned change in path, the

system activates one of the positioning motors to deviate from the course, and then later activates a motor or motors to return it to course. Also, when the system requires a new heading this system is the one that determines the direction, speed and depth the AUV takes. There is a lot of math that goes into the creation of these circuits and their implementation. Cross currents and known features have to be accounted for by the system.
Image Data Recognition
To have an AUV navigate underwater using visual data, that is, data in the visual electro-magnetic spectrum, the data must be defined in a manner the AUV can use to define a path. Essentialy all logic

in an AUV is binary so at some point the decision has to be either “yes” or “no.” There is software to facilitate this process and we have provided some of our own code to fill the gap. The image coming in from the camera has to be analyzed by the software into areas safe and desirable to navigate in and areas to avoid. Happily much of this is available already in an open source package called “openCV.” All that remains to do is to train the software to recognize the features we would like the Kraken to pursue and interact with. This requires a training process and software for interfacing with the existing equipment. Not an impossible task, but a challenge. It is an area of research and discussion for us.
Software Programming
For every piece of hardware on the Kraken there is a parallel software object. Software provides the functionality for the hardware. For example. A navigation motor has an on off switch. The software turns it on or off. Yet another, the manipulation arm can extend and manipulate. The software provides the program to cause this to happen. At any given time half of our team is occupied with software development, testing or debugging. Software is essential to the success of an AUV.
Sonar Guidance
One of the requirements for the RoboSub competition is to park the Kraken by finding the location of a Sonar ping. Underwater guidance by Sonar in an aquatic

environment in native conditions is necessary because visibility underwater is often limited or non-existent. Once again the challenge is to turn an analog signal of a reflected high energy wave into digital data and interpret it in a manner that is useful both for guidance and manipulation of objects. This is accomplished both by circuitry and by software and is the subject of much study and work by the team.
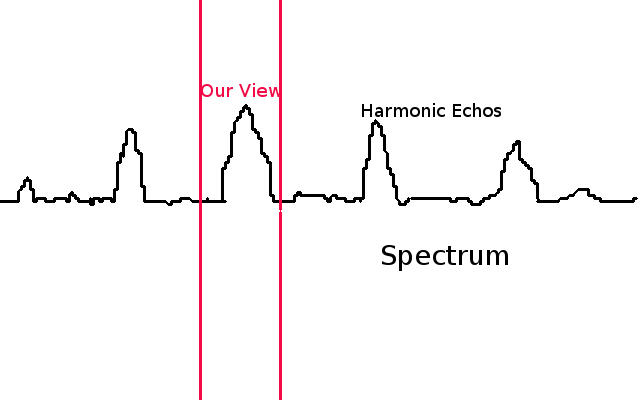
The current system is able to isolate an underwater signal with a great deal of accuracy. This is done by only looking at a very small segment of the spectrum, which removes the possibility of seeing harmonic shadows and ambient noise. The fall-off of signal detection around the desired signal is quite small, the graph looks something like this:
